Collision detection & Path planning
ECE276B Planning and Learning in Robotics @ UCSD.
Path planning in robotics refers to the process of determining an optimal path or trajectory for a robot to navigate from its current location to a desired goal location while avoiding obstacles and adhering to certain constraints. It is a crucial component of robotic systems, enabling them to autonomously navigate and accomplish tasks in complex and dynamic environments. The goal of path planning is to generate a collision-free and efficient path that minimizes costs such as distance, time, or energy consumption.
In this project, I implemented the A-star and collision detection algorithm, and compared A-star with RRT series algorithm on seven different environments and discussed their advantages and disadvantages. Click here for project document to see more results!
| Algorithm | Visualization | Time (s) |
|---|---|---|
| A-star w/ epsilon=1 | 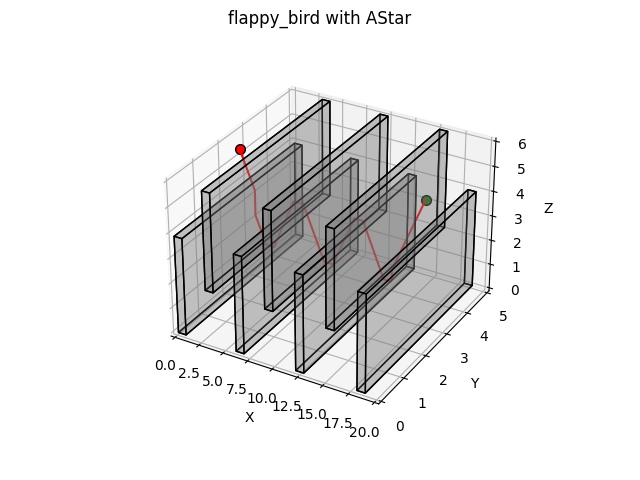 |
45.52 |
| A-star w/ epsilon=5 | 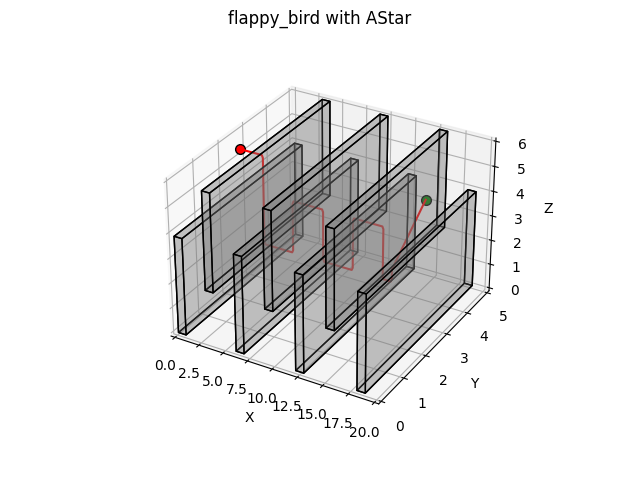 |
0.72 |
| RRT | 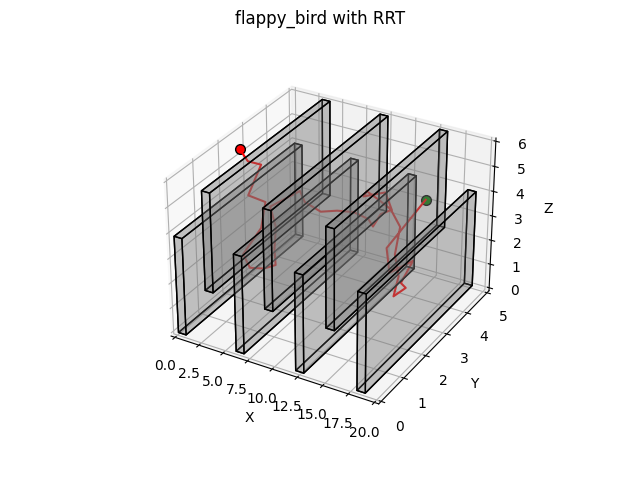 |
0.13 |
| RRT connect | 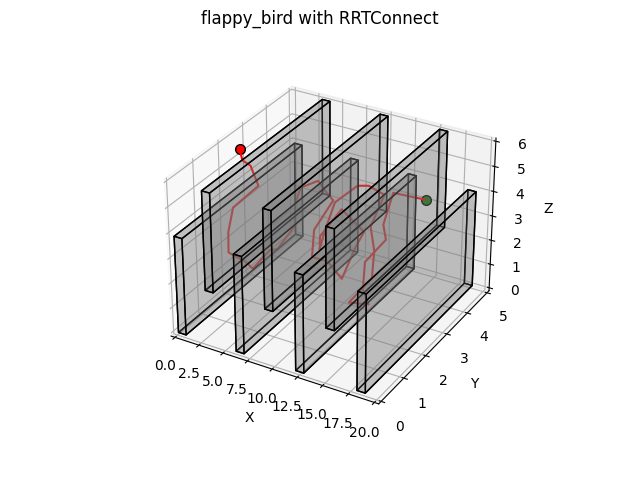 |
2.13 |
| RRT-Star | 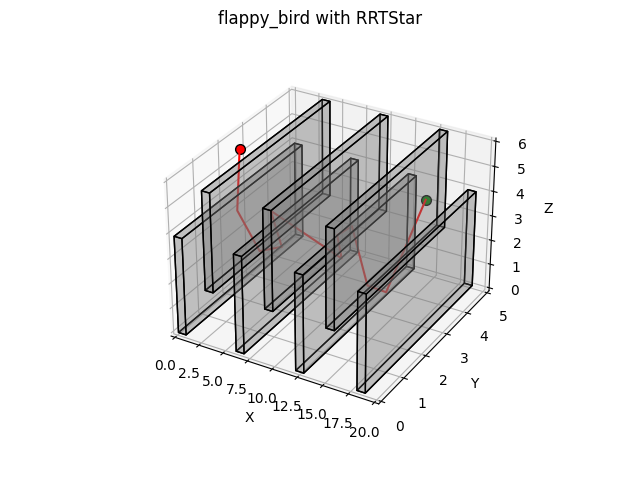 |
0.22 |